About two years ago, I re-launched this blog. Since then it’s become my primary “I gots stuff to say” mechanism. For quite a while I hoped Google Plus would reign supreme, but it’s become readily apparent that platform is buckling via “Death from a Thousand Cuts.” Google is destroying any hope it had of dethroning Facebook one feature at a time..
Realizing that, I put more effort into making Planet Geek my main sounding platform. I re-launched the site, imported all the old content into it, gave it a facelift, and started writing again. Sadly, with the most popular services not supporting RSS, just having the blog there means many people I’d like to keep in touch with simply won’t ever see the content. I needed a way to stay in touch with my friends, family, and social connections, without having to repost the same thing over and over and over again.
By far the industry leader is Facebook. I briefly considered using it as my primary soapbox, but I just can’t bring myself to subscribe to their “We will capture all the content, all the clicks, and all the users, and share none of it outside our walled garden” approach to media. The final straw is their constant tweaking of “We will only show you what we think you should see” (more rants on this in another post). So, no Facebook for me… so where should I go?
In the end, with respect to which social media platform I should settle on, I’ve chosen none of them, and all of them.
Planet-geek, running WordPress, is my go-to platform. I do 99% of my writing here, and whatever writing I have that passes for “creativity” is created using WordPress content tools. But that isn’t enough, is it? Our online social circles are fragmented and isolated. One group lives on Facebook, another lives on Livejournal, some are still on Plus, etc etc. They would never see the posts unless I manually reposted either the entire article or direct links to everything I write.
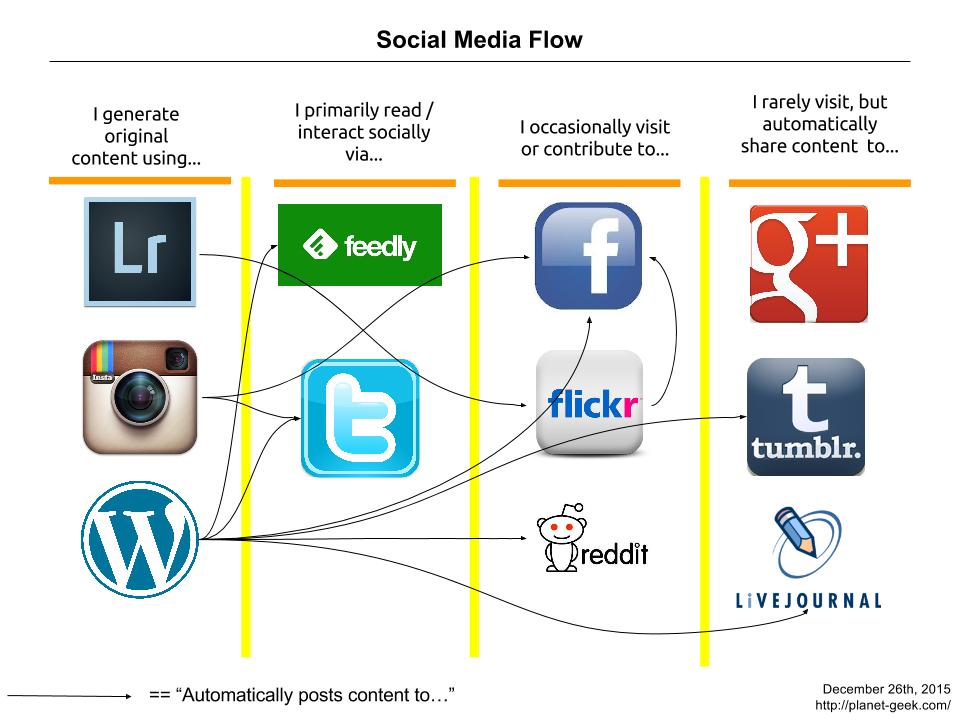
There’s no way to cover all the bases, so I’ve done the next best thing. I chose carefully where I create and publish content, but I’ve also built links that automatically share, if not the entire content, at least a notification to all the media channels I want to reach. I have to shout out to Nextscript’s SNAP tool for making this as painless as possible. SNAP (Social Network Automatic Poster) can link my blog to just about every social network out there. I’ve set up many links, and the tool works flawlessly.
But I do create content in other places. My photography needs a creative channel, and WordPress just isn’t the tool for it. So, Flickr and Instagram come into play. Wait, but sometimes I post to Twitter directly, what about that? Yeah, okay, that’s there too. Fortunately, many of these sites (unlike Facebook) allow for external notification / sharing of content. If I post a picture to Flickr, it has an automatic notification mechanism to Facebook. Instagram does the same thing. Sadly, Google Plus has none of these tools, and also has no easy API for posting content, so it tends to be the last thing updated (I need to do it by hand).
Thinking about this, I realized that my ‘communication flow’ would make a nice visual. The graphic above is a map of the public sites I use for social media / interaction. I’ve deliberately left off chat systems and email (I use IRC, Slack, Hangouts, Skype, and of course Email). For the most part, all these services notify me back via Email, so in theory, I should be able to just watch my inbox for interactions. A lot of times that doesn’t work so well. Still working on that part!
This was a fun chart to put together. It shows the results of months of tool configuration, auto-linking, loop detection (yeah, don’t set up auto-posters to one service that is auto-posting back to the original), etc.
Am I missing anything? Let me know… er, on the blog if you can. 🙂